


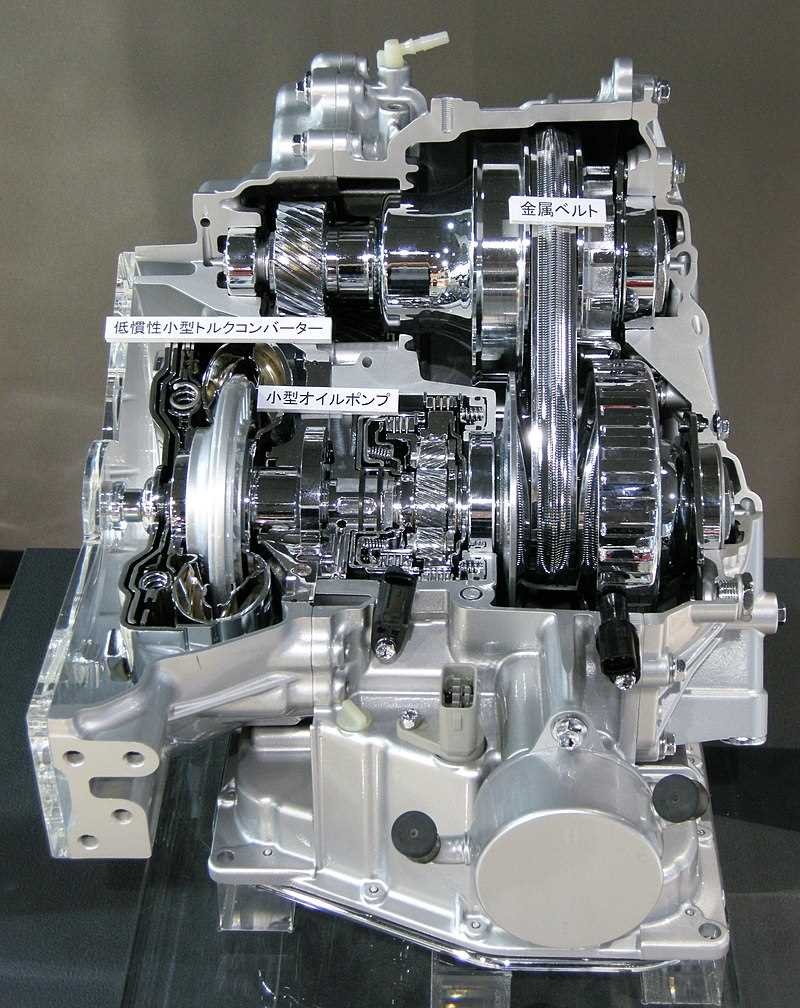
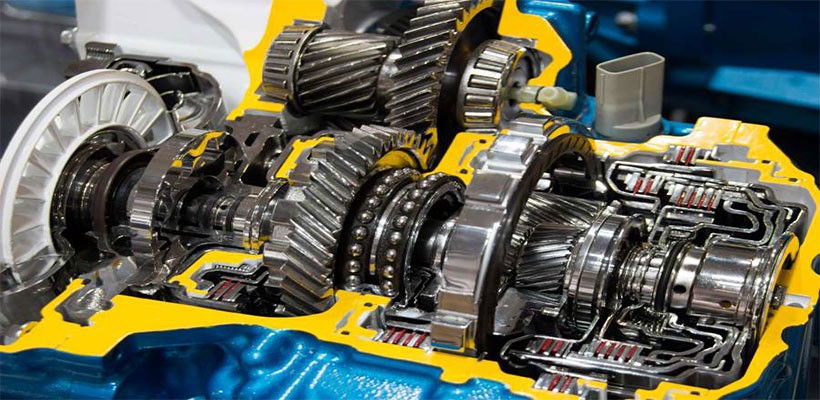
در یک CVT اپیسیکلیک (که یک CVT سیارهای نیز نامیده میشود)، نسبت دنده با کجکردن محورهای گویها به صورت پیوسته تغییر میکند تا شعاعهای تماسی مختلفی را ایجاد کند که اینکار به نوبه خود ورودی و خروجی را تحریک میکند. این سیستم میتواند چندین "سیاره" برای انتقال گشتاور از طریق چندین اتصال سیال داشته باشد. نسخههای تولید عبارتند از e-CVT تویوتا (که در سال ۱۹۹۷ تویوتا پریوس برای اولین بار عرضه شد) و CVT نووینچی.
جعبهدندههای دیسک اصطکاکی در چندین تراکتور و لکوموتیوهای کوچکی که در دهههای اولیه قرن بیستم ساخته شدهبودند، مورد استفاده قرار گرفتند. این گیربکسها شامل یک دیسک خروجی است که میتواند در سراسر سطح دیسک ورودی که بر روی آن میغلطد، حرکت کند. هنگامی که دیسک خروجی با موقعیت برابر با شعاع خود تنظیم شد، نسبت محرک حاصل ۱:۱ بود. جهت خروجی نیز میتواند با حرکت دیسک به سمت مرکز دیسک ورودی معکوس شود. گیربکس لکوموتیوهای پلایموث اولیه به این صورت بود، در حالی که در تراکتورهایی که از دیسکهای اصطکاکی استفاده میکردند، دامنه سرعتهای معکوس معمولا محدود بود. یک CVT مغناطیسی گشتاور را با استفاده از کوپلینگ مغناطیسی غیر تماسی به جای تماس فیزیکی انتقال می دهد. این طرح از دو حلقه از آهنرباهای دائمی با حلقهای از قطعات قطب فولادی بین آنها استفاده میکند تا یک شبکه سیارهای با استفاده از آهنرباها ایجاد کند. ادعا میشود که در مقایسه با یک سیستم مکانیکی، ۳ تا ۵ درصد کاهش در مصرف سوخت ایجاد میکند.

برخی از CVTها همچنین میتوانند به عنوان یک گیربکس متغیر نامحدود (IVT) عمل کنند که طیف نامحدودی از چرخدندههای پایین را ارائه میدهد (به عنوان مثال حرکت یک وسیلهنقلیه به سمت جلو با سرعت آهسته نامحدود). برخی از IVTها از برگشت به عقب (که در آن محور خروجی میتواند آزادانه بچرخد، مانند یک گیربکس خودرو در حالت خلاص) به دلیل ایجاد گشتاور بازگشت به عقب بالا، جلوگیری میکنند. دیگر IVT، مانند انواع جغجغهای، به شفت خروجی اجازه چرخش آزادانه را میدهند. انواع CVT که میتوانند به عنوان IVT عمل کنند، شامل CVT اپیسیکلیک، دیسک اصطکاکی و جغجغهای هستند.
در یک CVT اپیسیکلیک، هنگامی که سرعت چرخش شفت خروجی برابر با تفاوت بین دو سرعت دیگر در CVT باشد، نسبت درایو بینهایت پایین تولید میشود. در این وضعیت، CVT به عنوان تنظیمکننده سرعت چرخش هر یک از سه چرخشدهنده سامانه دنده سیارهای عمل میکند. از آنجا که دو چرخنده ورودی و خروجی تنظیمکننده هستند، CVT را می توان طوری تنظیم کرد که به سرعت خروجی صفر برای هر سرعت ورودی دادهشده منجر شود. سرعت ورودی CVT همیشه با موتور برابر است، حتی زمانی که سرعت خروجی صفر باشد.
.jpg)
در سال ۱۸۷۹، میلتون ریوس یک CVT (که در آن زمان گیربکس سرعت متغیر نامیده میشد) را برای استفاده در ارهبرقی اختراع کرد. در سال ۱۸۷۹، ریوز شروع به برازش این گیربکس با ماشینهای خود کرد و همچنین CVT ریوز توسط چندین تولیدکننده دیگر نیز مورد استفاده قرار گرفت.
موتورسیکلت سال ۱۹۱۱ شهر زنیت گراوآ ۶ اسب بخاری از یک CVT فولیای گرادوآ استفاده کرد. یک سال بعد، راج- وایتورث مولتیگیر یک CVT مشابه اما بهبودیافته منتشر کرد. سایر ماشینهای اولیه که از یک CVT استفاده کردند شامل دیوید سیکلرهای سه چرخ کوچک در سالهای ۱۹۱۳ تا ۱۹۲۳ بودند که در اسپانیا ساخته شدهبودند، کلاینو ۱۹۲۳ که در انگلستان ساخته شدهبود، و کنستانتین سالون ۱۹۲۶ که در انگلستان ساخته شدهبود.

اولین خودروی تولید انبوه که از یک CVT استفاده کرد، خودروی سواری کوچک DAF ۶۰۰ در سال ۱۹۵۸ بود که در هلند ساخته شد. این گیربکس متغیر در چندین وسیلهنقلیه ساختهشده توسط DAF و ولوو تا دهه ۱۹۸۰ مورد استفاده قرار گرفت.
فورد فیستا (نسل دوم) ۱۹۸۷ و فیات اونو (نسل اول) اولین ماشینهایی بودند که به CVT با تسمه فولادی مجهز شدند (بر خلاف طراحی DAF با تسمه لاستیکی ضعیفتر). گیربکس مولتیترونیک توسط فورد، ون دوورن و فیات توسعه داده شد و کار با این گیربکس از سال ۱۹۷۶ آغاز شد.
همچنین در سال ۱۹۸۷، ECVT به عنوان یک گیربکس آپشن بر روی سوبارو جاستی معرفی شد، تولید به ۵۰۰ واحد در ماه، به دلیل اینکه وان دوورنو ترنسمیسی در هلند تنها میتوانست این تعداد تسمه فولادی را برای آنها تولید کند، محدود میشد. در ماه ژوئن، عرضه به ۳۰۰۰ عدد در ماه افزایش یافت، که این امر موجب شد که سوبارو CVT را در خودروی سوبارو رکس کی قرار دهد. سوبارو همچنین CVTهای خود را به دیگر تولید کنندگان عرضه کردهاست (مانند نیسان میسرا ۱۹۹۲).
هوندا سیویک ۱۹۹۶ (نسل ششم) یک CVT مولتیماتیک فولیای معرفی کرد که شامل یک مبدل گشتاور، برای عمل "خزش" کم سرعت بود.

سپس استفاده از CVT در سالهای بعدی برای مدلهایی شامل نیسان کوپه ۱۹۹۸، روور ۲۵ ۱۹۹۹و آئودی A6 سال ۱۹۹۹ بود. اصطلاحات بازاریابی برای CVT شامل "لینارترونیک" (سوبارو)، "ایکسترونیک" (جتکو، نیسان، رنو)، اینوکسIII (میتسوبیشی)، مولتیترونیک (فولکس واگن، آئودی)، "اتوترونیک" (مرسدس - بنز) وIVT (هیوندا، کیا) بود.
نیسان سدریک (Y۳۴) در سال ۱۹۹۹ از یک CVT جغجغهای بر خلاف طرحهای مبتنی بر فولی استفاده کرد که توسط سایر تولیدکنندگان با نام نیسان اکستتروئید مورد استفاده قرار گرفت و دارای یک مبدل گشتاور بود. سپس نیسان در سال ۲۰۰۳ از CVTهای جغجغهای به فولیای تغییر کرد. ادعا میشود که نسخه CVT استفاده شده در یک موتور V۶ در نیسان آلتیما قادر به انتقال بارهای گشتاور بالاتری نسبت به دیگر CVTهای تسمهای است.
تویوتا کرولا ۲۰۱۹ (E۲۱۰) با یک CVT به کمک یک "دنده راهاندازی" فیزیکی در کنار فولی CVT در دسترس است. گیربکس تا ۴۰ کیلومتر بر ساعت (۲۵ مایل بر ساعت)، از دنده پرتاب به منظور افزایش شتاب و کاهش تنش در CVT استفاده میکند. بالاتر از این سرعت، گیربکس به CVT فولیای تغییر میکند.
چندین وسیله نقلیه الکتریکی هیبریدی مانند تویوتا پریوس، نیسان التیما و فورد اسکیپ گیربکس هیبریدی الکتریکی متغیر (EVT) برای کنترل سهم توان از موتور الکتریکی و موتور احتراق داخلی استفاده میکنند. با وجود نام مشابه، این ابزارها اساسا متفاوت از CVT هستند (که توسط یک منبع واحد نیرو میگیرند).
تویوتا K CVT ۲۰۰۰ تا اکنون
در ایالاتمتحده، از اوایل دهه ۱۹۷۰ خودروهای مسابقهای فرمول ۵۰۰ از CVTها استفاده کردهاند. CVTها در سال ۱۹۹۴ به دلیل نگرانی از افزایش هزینههای تحقیق و توسعه و حفظ سطح خاصی از مشارکت راننده با وسیله نقلیه در فرمول یک (همراه با چندین سیستم الکترونیکی دیگر و کمکهای راننده) ممنوع شدند.
بسیاری از وسایل نقلیه کوچک مانند برفروبها، ماشینهای گلف و موتور اسکوتر از CVTها، به طور معمول تسمه لاستیکی یا انواع فولی متغیر استفاده میکنند. CVTها در این وسایلنقلیه اغلب از یک طراحی تسمه لاستیکی با محیط ثابت بدون کشش تولید شده با مواد بادوام و انعطافپذیر مختلف به دلیل سادگی مکانیکی و سهولت استفاده بیشتر آنها که بر عدم کارایی آنها غالب است، استفاده میکنند. برخی از موتور اسکوترها شامل یک کلاچ گریز از مرکز هستند، تا زمان معکوس کردن دستی یا تغییر، به آنها کمک کنند.
موتورسیکلت اتوماتیک آفرود روکون RT۳۴۰ TCR در سال ۱۹۷۴ با یک CVT برفروب تجهیز شد. اولین ATV مجهز به یک CVT در سال ۱۹۸۵ مربوط به شرکت پلی اریس صنایع تریل باس بود.
ماشینهای برداشت کمباین در اوایل دهه ۱۹۵۰ از درایوهای تسمه متغیر استفاده میکردند. بسیاری از تراکتورهای کوچک و دروگرهای خودرو برای خانه و باغ از CVTهای تسمه لاستیکی ساده استفاده میکنند. CVTهای هیدرواستاتیک در خودروهای بزرگتر بسیار رایج هستند. در عملیات درو یا برداشت، CVT امکان تنظیم مستقل سرعت رو به جلوی تجهیزات را به صورت مستقل از سرعت موتور فراهم میکند. این امر به اپراتور این امکان را میدهد تا با توجه به ضخامت محصول در صورت نیاز سرعت را کند یا تسریع نماید.
تجهیزات کوچک و متوسط کشاورزی و حملونقل زمینی اغلب از CVTهای هیدرواستاتیکی استفاده میکنند. از آنجا که موتورهای این ماشینها به طور معمول در خروجی توان ثابت (برای تامین نیروی هیدرولیکی یا ماشینآلات قدرت) کار میکنند، تلفات در بهرهوری مکانیکی با افزایش بهرهوری عملیاتی جبران میشود. برای مثال، در تجهیزات خاکبرداری، دفعات شاتل رو به جلو - معکوس کاهش یافتهاند. سرعت و توان خروجی CVT برای کنترل سرعت حرکت تجهیزات و گاهی برای هدایت تجهیزات استفاده میشود. در مورد دوم، اختلاف سرعت مورد نیاز برای هدایت تجهیزات را می توان توسط CVTهای مستقلی ایجاد کرد که امکان فرماندادن بدون اشکالات متعدد مربوط به دیگر روشهای هدایت اسکید (مانند شکست یا از دست دادن کشش) را فراهم میکند.
تراکتور باغی سال ۱۹۶۵ ویل هورس ۸۷۵ و ۱۰۷۵ اولین وسیلههایی بودند که با یک CVT هیدرواستاتیکی نصب شدند. طراحی مورد نیاز از یک پمپ با جابجایی متغیر و موتور هیدرولیکی نوع دندهای جابجایی ثابت که در یک بسته فشرده ترکیب شده بود، استفاده کرد. نسبتهای معکوس با معکوس کردن جریان پمپ از طریق شیبدار کردن صفحه سواش به دست آمدند. شتاب با استفاده از متراکمکننده فشار و شیرهای امداد واقع بین پمپ و موتور، برای جلوگیری از تغییرات ناگهانی در سرعت ممکن با کوپلینگ هیدرولیکی مستقیم، محدود و هموار شد. نسخههای بعدی شامل موتورهای صفحهای ثابت و پمپهای توپی بودند.
فنتواریو ۹۲۶ در سال ۱۹۹۶ اولین تراکتور سنگین بود که به یک CVT هیدرواستاتیکی مجهز شد. بیش از ۱۰۰۰۰۰ تراکتور با این نوع گیربکس تولید شدهاند.

CVTها از دهه ۱۹۵۰ در سیستمهای تولید برق هواپیما مورد استفاده قرار گرفتهاند.
CVTهای دارای فلایویل به عنوان یک کنترلر سرعت بین یک موتور (به عنوان مثال توربین باد) و ژنراتور الکتریکی مورد استفاده قرار میگیرند. زمانی که موتور قدرت کافی تولید میکند، ژنراتور مستقیما به CVT که برای تنظیم سرعت موتور به کار میرود، متصل میشود. زمانی که خروجی توان خیلی پایین باشد، ژنراتور قطع میشود و انرژی در چرخ لنگر (فلایویل) ذخیره میشود. تنها زمانی که سرعت فلایویل کافی باشد، انرژی جنبشی به طور متناوب در سرعت مورد نیاز ژنراتور به الکتریسیته تبدیل میشود.
برخی از ماشینهای متهکاری و آسیابکاری شامل یک سیستم CVT ساده برای کنترل سرعت مرغک هستند. در این سیستم، قطر موثر فولیهای شفت خروجی به دلیل شکل مخروطی آنها قابل تنظیم است. فولی روی موتور معمولا قطر ثابتی دارد (یا گاهی اوقات با گامهای دقیقی دارد که امکان انتخاب محدودههای سرعت مختلف را ایجاد میکند). اپراتور سرعت مته را با استفاده از چرخ دستی که عرض شکاف بین دو نیمه فولی را کنترل میکند، تنظیم میکند. یک فولی در گیربکس تسمهای برای گرفتن و یا رها کردن لقی تسمه به هنگام تغییر سرعت، به کار گرفته میشود.
وینچها و بالابرها نیز کاربرد CVTها هستند، به خصوص برای کسانی که نسبت انتقال را با گشتاور مقاوم تطبیق میدهند.
دوچرخهها با استفاده از CVT موفقیت تجاری محدودی داشتهاند، با یک مثال که طیف وسیعی از دنده معادل با هشت تغییر سرعت را فراهم میکند. چرخدندههای کوچک دوچرخه در بالا رفتن از تپه کمک میکرد، اما CVT به طور قابلتوجهی وزن دوچرخه را افزایش می داد.
ماشینهای هیدرولیکی از نیروی سیال مایع برای انجام کار استفاده میکنند. خودروهای سنگین ساختمانی یک مثال معمول هستند. در این نوع ماشین، سیال هیدرولیکی به موتورهای هیدرولیکی مختلف و سیلندرهای هیدرولیکی در سراسر دستگاه پمپ میشود و با توجه به مقاومت موجود تحت فشار قرار میگیرد. سیال به طور مستقیم یا خودکار توسط شیرهای کنترلی، کنترل میشود و از طریق شیلنگها، تیوبها/لولهها توزیع میشود.
سیستمهای هیدرولیک، مانند سیستمهای پنوماتیک، از قانون پاسکال تبعیت میکنند که میگوید اگر به یک سیال درون یک سیستم بسته هر گونه فشاری اعمال شود، به طور مساوی در همه جا و در همه جهات منتقل خواهد شد. یک سیستم هیدرولیک از یک مایع تراکمپذیر به جای یک گاز تراکمپذیر به عنوان سیال، استفاده میکند.
محبوبیت ماشینآلات هیدرولیکی به دلیل توان بسیار زیادی است که میتواند از طریق لولههای کوچک و شیلنگهای انعطافپذیر منتقل شود، و چگالی توان بالا و آرایه گستردهای از عملگرها که میتوانند از این توان استفاده کنند، و نیروهایی عظیمی که میتوانند چند برابر شدن فشار اعمال شده بر روی نواحی نسبتا بزرگ به دست آیند. یک اشکال، در مقایسه با ماشینهایی که از چرخدندهها و شفتها استفاده میکنند، این است که هر گونه انتقال توان به دلیل مقاومت جریان سیال از طریق لولهکشی، منجر به برخی تلفات میشود.

یک بیل مکانیکی، هیدرولیک اصلی: سیلندرهای بوم، محرک معلق، فن خنککننده و درایو مسیریاب
جوزف براماه در سال ۱۷۹۵ فشار هیدرولیک را به ثبت رساند. هنری مادسلای در حین کار در مغازه برمهاس پیشنهاد یک بستهبندی چرمي را داد. مشاهده نتایج بهتر سبب شد که پرس هیدرولیک در نهایت جای چکش بخار را برای آهنگری فلزی گرفت.
به دلیل اینکه تامین توان در مقیاس بزرگ برای تکتک موتورهای بخار غیر عملی بود، ایستگاه مرکزی سیستمهای هیدرولیکی توسعه داده شدند. نیروی هیدرولیکی برای کار با جرثقیلها و دیگر ماشینآلات در بنادر بریتانیا و سایر نقاط اروپا به کار میرفت. بزرگترین سیستم هیدرولیکی، در لندن وجود داشت. توان هیدرولیکی به طور گسترده در تولید فولاد بسمر مورد استفاده قرار میگرفت. توان هیدرولیکی برای آسانسورها، راهاندازی قفل کانال و بخشهای چرخشی پلها نیز مورد استفاده قرار میگرفت. برخی از این سیستمها در قرن بیستم به خوبی مورد استفاده قرار گرفتند.
هری فرانکلین وایکرز توسط ASME "پدر هیدرولیک صنعتی" نامیده شد.
یک ویژگی اساسی سیستمهای هیدرولیک، توانایی اعمال نیرو یا ضرب گشتاور به شیوهای آسان، مستقل از فاصله بین ورودی و خروجی، بدون نیاز به چرخدندههای مکانیکی یا اهرمها، یا با تغییر نواحی موثر در دو سیلندر متصل یا جابجایی موثر (cc/rev) بین یک پمپ و موتور است. در موارد عادی، نسبتهای هیدرولیک با یک نیروی مکانیکی یا نسبت گشتاور برای طراحی بهینه ماشین مانند حرکات بوم و حرکات کششی برای یک ماشین حفاری ترکیب میشوند.
مثالها
دو استوانه هیدرولیکی متصل به هم
استوانه C۱ شعاع یک اینچ و استوانه C۲ شعاع ده اینچ دارد. اگر نیروی اعمالشده روی C۱ برابر با lbf۱۰ باشد، نیروی اعمالشده بر C۲ lbf ۱۰۰۰ است زیرا C۲ صد برابر مساحت بزرگتری دارد S = πr²))
عیب آن این است که شما باید C۱ را به اندازه ۱۰۰ اینچ حرکت دهید تا C۲ به اندازه یک اینچ حرکت کند. رایجترین کاربرد این کار جک هیدرولیکی کلاسیک است که در آن یک سیلندر پمپاژ با قطر کوچک به سیلندر بالابری با قطر بزرگ متصل میشود.
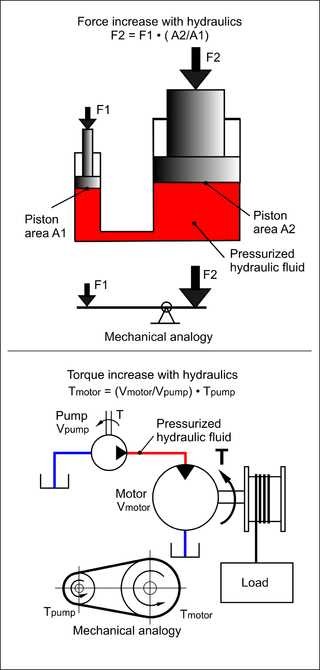
ویژگیهای اساسی استفاده از هیدرولیک در مقایسه با مکانیک برای نیرو و گشتاور افزایش/کاهش در یک انتقال.
اگر یک پمپ چرخشی هیدرولیک با جابجایی cc/rev ۱۰ به یک موتور چرخشی هیدرولیک با cc/rev ۱۰۰ متصل شود، گشتاور شفت مورد نیاز برای راهاندازی پمپ یک دهم گشتاور موجود در شفت موتور است، اما سرعت شفت (rev/min) موتور نیز تنها یک دهم سرعت شفت پمپ است.
این ترکیب در واقع مشابه همان نوع ضرب نیرو در مثال سیلندر است، فقط نیروی خطی در این مورد یک نیروی چرخشی است، که به عنوان گشتاور تعریف میشود.
هر دوی این مثالها معمولا به عنوان یک گیربکس هیدرولیکی یا گیربکس هیدرواستاتیک شامل یک "نسبت دنده" هیدرولیک مشخص شناخته میشوند.
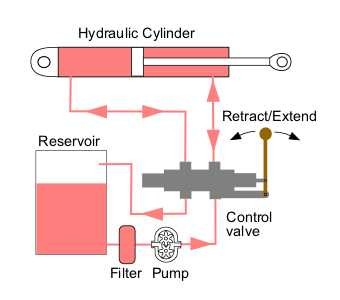
مدار هیدرولیک، سیستمی متشکل از مجموعهای پیوسته از اجزای مجزا است که مایع را حمل میکنند. هدف این سیستم ممکن است کنترل جایی که سیال جریان دارد (مانند شبکهای از لولههای خنککننده در یک سیستم ترمودینامیکی) یا کنترل فشار سیال (مانند تقویتکنندههای هیدرولیکی) باشد. برای مثال، ماشینآلات هیدرولیک از مدارهای هیدرولیکی (که در آن سیال هیدرولیک تحت فشار قرار میگیرد، از طریق پمپهای هیدرولیک، لولهها، شیلنگها، موتورهای هیدرولیک، سیلندرهای هیدرولیک و غیره) برای جابهجایی بارهای سنگین استفاده میکنند. رویکرد توصیف یک سیستم سیال بر حسب مولفههای گسسته از موفقیت نظریه مدار الکتریکی الهامگرفته شدهاست. همانطور که نظریه مدار الکتریکی زمانی کار میکند که عناصر گسسته و خطی باشند، نظریه مدار هیدرولیک زمانی بهتر کار میکند که عناصر (اجزای غیرفعال مانند لولهها یا خطوط انتقال یا اجزای فعال مانند بستههای قدرت یا پمپها) گسسته و خطی باشند. این معمولا به این معنی است که تجزیه و تحلیل مدار هیدرولیک برای لولههای بلند و نازک با پمپهای گسسته، همانطور که در سیستمهای جریان فرآیند شیمیایی یا وسایل مقیاس میکرو یافت میشود، بهتر عمل میکند.
این مدار شامل مولفههای زیر است:
برای اینکه سیال هیدرولیک کار کند، باید به محرک و/یا موتور جریان یابد، سپس به مخزن باز میگردد. سپس سیال فیلتر شده و دوباره پمپ میشود. مسیر سیال هیدرولیکی، مدار هیدرولیکی نامیده میشود که انواع مختلفی از آن وجود دارد.
مدارهای مرکز باز از پمپهایی استفاده میکنند که جریان پیوسته را تامین میکنند. جریان از طریق مرکز باز شیر کنترل به مخزن باز میگردد. بدین معنی که وقتی شیر کنترل در مرکز قرار میگیرد، یک مسیر بازگشتی باز به مخزن فراهم میکند و سیال به فشار بالا پمپ نمیشود. در غیر این صورت، اگر شیر کنترل تحریک شود، سیال را به (یا از) یک محرک و مخزن هدایت میکند. فشار سیال برای مقابله با هر مقاومتی افزایش خواهد یافت چون پمپ خروجی ثابتی دارد. اگر فشار بیش از حد بالا برود، سیال از طریق یک شیر کنترل فشار به مخزن باز میگردد. چندین شیر کنترل ممکن است به صورت سری روی هم قرار بگیرند. این نوع مدار میتواند از پمپهای جابجایی ثابت و ارزان استفاده کند.
مدارهای مرکز بسته، فشار کامل را برای شیرهای کنترلی تامین میکنند، چه شیر تحریک شده باشد و چه نشده باشد. پمپها نرخ جریان خود را تغییر میدهند، مایع هیدرولیکی بسیار کمی را پمپاژ میکنند تا زمانی که اپراتور یک شیر را تحریک کند. بنابراین فولی شیر به یک مسیر بازگشت مرکز باز به مخزن نیاز ندارد.
چندین شیر میتوانند به صورت موازی متصل شوند و فشار سیستم برای همه شیرها برابر است.

ورودی پمپ و بازگشت موتور (از طریق شیر جهتدار) به مخزن هیدرولیک متصل میشوند. اصطلاح حلقه برای بازخورد به کار میرود؛ اصطلاح صحیحتر مدار باز در مقابل مدار بسته است. مدارهای مرکز باز از پمپهایی استفاده میکنند که جریان پیوسته را تامین میکنند. جریان از طریق مرکز باز شیر کنترل به مخزن باز میگردد. بدین معنی که وقتی شیر کنترل در مرکز قرار میگیرد، یک مسیر بازگشتی باز به مخزن فراهم میکند و سیال به فشار بالا پمپ نمیشود. در غیر این صورت، اگر شیر کنترل تحریک شود، سیال را به (و از) یک محرک و مخزن هدایت میکند. فشار سیال برای مقابله با هر مقاومتی افزایش خواهد یافت، چون پمپ خروجی ثابتی دارد. اگر فشار بیش از حد بالا برود، سیال از طریق یک شیر کنترل فشار به مخزن باز میگردد. چندین شیر کنترل ممکن است به صورت سری روی هم انباشته شوند. این نوع مدار میتواند از پمپهای جابجایی ثابت و ارزان استفاده کند.
یک مدار هیدرولیکی ساده مرکز باز.
بازگشت موتور به طور مستقیم به ورودی پمپ متصل میشود. برای حفظ فشار در سمت فشار پایین، مدارها یک پمپ شارژ (یک پمپ دندهای کوچک) دارند که روغن خنک شده و فیلتر شده را در سمت فشار پایین تامین میکند. مدارهای حلقه بسته عموما برای گیربکسهای هیدرواستاتیک در کاربردهای حرکتی استفاده میشوند. مزایا: بدون شیر جهتدار و پاسخ بهتر، مدار میتواند با فشار بالاتر کار کند. زاویه چرخش پمپ جهت جریان مثبت و منفی را پوشش میدهد. معایب: پمپ را نمی توان برای هر تابع هیدرولیکی دیگری به شیوهای آسان به کار برد و خنک سازی میتواند به دلیل تبادل محدود جریان روغن یک مشکل باشد. سیستمهای حلقه بسته قدرت بالا عموما باید یک "شیر تخلیه" در مدار نصب کنند تا جریان بسیار بیشتری را نسبت به جریان نشتی پایه از پمپ و موتور، برای افزایش خنک سازی و فیلترینگ، مبادله کنند. شیر تخلیه معمولا در محفظه موتور ادغام میشود تا برای روغنی که در خود محفظه موتور میچرخد نیز خنک شود. تلفات محفظه موتور ناشی از اثرات چرخشی و تلفات در بلبرینگ میتواند قابلتوجه باشد، زیرا سرعت موتور به rev/min ۴۰۰۰ - ۵۰۰۰ یا حتی بیشتر در حداکثر سرعت وسیله نقلیه خواهد رسید.
بنابراین اگر انتقال برای فشارهای بالا و سرعتهای موتور بالا طراحی شدهباشد، وجود یک پمپ شارژ بزرگ بسیار مهم است. دمای بالای روغن معمولا یک مشکل عمده در هنگام استفاده از گیربکسهای هیدرواستاتیک در سرعتهای بالای وسایل نقلیه برای دورههای طولانیتر، به عنوان مثال در هنگام انتقال ماشین از یک محل کار به محل کار دیگر، می باشد. دمای بالای روغن برای مدتهای طولانی، طول عمر گیربکس را به شدت کاهش خواهد داد. برای پایین نگه داشتن دمای روغن، فشار سیستم در طول انتقال باید کاهش یابد، به این معنی که حداقل جابجایی برای موتور باید به یک مقدار معقول محدود شود. فشار مدار حدود ۲۰۰ تا ۲۵۰ بار در طول انتقال توصیه میشود.
سیستمهای حلقه بسته در تجهیزات متحرک به طور کلی برای گیربکس به عنوان جایگزینی برای گیربکسهای مکانیکی و هیدرودینامیکی (مبدل) مورد استفاده قرار میگیرند. مزیت آن نسبت دنده بدون مرحله (سرعت/گشتاور متغیر پیوسته) و کنترل انعطافپذیرتر نسبت دنده با توجه به بار و شرایط عملیاتی است. گیربکس هیدرواستاتیک به طور کلی به حدود توان حداکثر ۲۰۰ کیلووات محدود میشود، زیرا هزینه کل در توان بالاتر در مقایسه با گیربکس هیدرودینامیکی بسیار بالا است. به عنوان مثال لودر چرخ بزرگ و ماشینهای سنگین نیز معمولا به گیربکسهای مبدل مجهز هستند. دستاوردهای فنی اخیر گیربکسهای مبدل، کارایی را بهبود بخشیده و پیشرفتها در نرمافزار نیز خصوصیات آن را بهبود بخشیدهاست، به عنوان مثال برنامههای تغییر دنده انتخابی در طول عملیات و مراحل بیشتر، ویژگیهای مشابه با گیربکس هیدرواستاتیکی را به آنها میدهد.
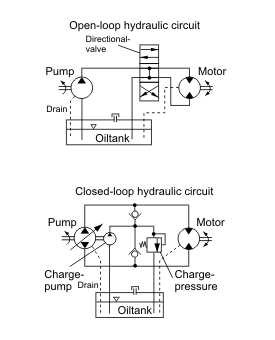
مدارهای حلقه باز و حلقه بسته
گیربکسهای هیدرواستاتیک ماشینهای خاکبرداری، مانند لودر، اغلب مجهز به یک "پدال اینچ" جداگانه هستند که برای افزایش موقت دور موتور دیزل استفاده میشود. در حالی که سرعت خودرو را به منظور افزایش خروجی توان هیدرولیکی در دسترس برای هیدرولیکهای فعال در سرعتهای پایین کاهش داده و نیروی کششی افزایش مییابد. این تابع شبیه به گیر انداختن یک جعبهدنده مبدل در دور موتور بالا است. تابع اینچ پیش تنظیمات نسبت دنده هیدرواستاتیکی را برحسب دور موتور دیزل تحتتاثیر قرار میدهد.
مدارهای مرکز بسته در دو پیکربندی اصلی وجود دارند که معمولا مربوط به تنظیمکننده پمپ متغیری است که روغن را تامین میکند:
سیستمهای سنجش بار (سیستم LS) تلفات توان کمتری تولید میکنند، زیرا پمپ میتواند هم جریان و هم فشار را برای مطابقت با الزامات بار کاهش دهد، اما با توجه به پایداری سیستم نیاز به تنظیم بیشتری نسبت به سیستم CP دارد. سیستم LS همچنین نیاز به شیرهای اضافی و شیرهای جبرانی در مسیر شیرهای جهتدار دارد، بنابراین از لحاظ فنی پیچیدهتر و گرانتر از سیستم CP است. سیستم LS یک تلفات توان ثابت مرتبط با افت فشار تنظیم برای تنظیمکننده پمپ تولید میکند:

میانگین ΔPLS در حدود ۲ مگاپاسکال (۲۹۰ psi) است. اگر جریان پمپ بالا باشد تلفات اضافی میتواند قابلتوجه باشد. همچنین در صورت تغییر زیاد فشار بار، اتلاف توان افزایش مییابد. به منظور پایین آوردن تلفات توان، نواحی سیلندر، جابجاییهای موتور و بازوهای گشتاور مکانیکی باید با توجه به تطبیق فشار بار طراحی شوند. زمانی که چندین تابع به طور همزمان اجرا میشوند و توان ورودی به پمپ برابر است با (ماکزیمم فشار بار+ΔpLS) x برابر جریان، فشار پمپ همیشه برابر با حداکثر فشار بار است.
پنج نوع اساسی سیستمهای سنجش بار
۱. سنجش بار بدون جبرانساز در شیرهای جهتدار. پمپ LS با کنترل هیدرولیکی.
۲. سنجش بار با جبرانساز بالادست جریان، برای هر شیر جهت دار متصل. پمپ LS با کنترل هیدرولیکی.
۳. سنجش بار با جبرانساز در پایین دست جریان برای هر شیر جهتدار متصل. پمپLS با کنترل هیدرولیکی.
۴. سنجش بار با ترکیبی از جبرانسازهای بالادست و پایین دست جریان. پمپLS با کنترل هیدرولیکی.
۵. سنجش بار با جابجایی پمپ کنترلشده الکتریکی سنکرون و کنترل الکتریکی سنکرون
روش مساحت جریان شیر دارای پاسخ سریعتر، پایداری بیشتر و تلفات کمتر سیستم میباشد. این نوع جدیدی از سیستم LS است که هنوز به طور کامل توسعه نیافته است.
از لحاظ فنی جبرانساز نصبشده در پایین دست جریان در یک دریچه را می توان به صورت فیزیکی "بالا دست جریان" نصب کرد، اما به عنوان جبرانساز پایین جریان کار میکند.
سیستم نوع (۳) این مزیت را میدهد که توابع فعال شده مستقل از ظرفیت جریان پمپ سنکرون میشوند. رابطه جریان بین دو یا چند تابع فعالشده مستقل از فشار بار باقی میماند، حتی اگر پمپ به زاویه چرخش ماکزیمم برسد. این ویژگی برای ماشینهایی که اغلب با پمپ در زاویه حداکثر چرخش و با چندین تابع فعال که باید با سرعت هماهنگ شوند، مانند دستگاههای حفاری، مهم است.
با سیستم نوع (۴)، توابع با جبرانکنندههای بالا دست جریان دارای اولویت هستند. مثال: عملکرد فرمان برای خاکبردار چرخدار. نوع سیستم با جبرانسازهای پایین دست جریان معمولا یک علامت تجاری منحصر به فرد بسته به تولیدکننده شیرها دارد، برای مثال LSC (لیند هیدرولیکس)، LUDV (بوش رکسروت هیدرولیکس)، "فلوشیرینگ" (پارکر هیدرولیکس) و غیره. هیچ نام استاندارد رسمی برای این نوع سیستم ایجاد نشده است، اما فلوشیرینگ یک نام مشترک برای آن است.
در نظر داشته باشید شما میتوانید برای خرید لوازم یدکی کیا و لوازم یدکی هیوندا به صفحه تماس با ما مراجعه کنید و با کارشناسان ما در ارتباطات باشید.


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








